Material Removal Cobots Replace Risk with Consistency
Grinding, sanding, and weld removal often lead to part variation caused by human fatigue or uneven pressure. Material removal cobots change that. These collaborative robots automate demanding tasks such as grinding, sanding, deburring, and weld removal while maintaining steady force and precise motion. Designed to work safely beside operators, they use simple programming and compact cells that fit easily into existing production lines.
Manual material removal is difficult to keep consistent. Small changes in angle or pressure can cause gouges, heat marks, or burrs that lead to rework or scrap. The work is repetitive and physically demanding, exposing operators to dust, vibration, and strain. With fewer people willing to take on these jobs, many shops are turning to cobots to keep production moving.
Equipped with force-controlled spindles and compliance tools, cobots apply uniform pressure and repeat each motion with accuracy. The result is a stable, predictable process that runs safely and consistently across every shift.
Manual Material Removal Limits Safety, Quality, and Throughput
Manual material removal relies on human endurance, not consistency. This often leads to safety issues, quality variation, and lost production time. Grinding, sanding, and deburring are all subject to human limits. Operators must hold heavy tools for long periods, often in awkward positions, while trying to maintain the same angle and pressure on every part.
Even skilled technicians can’t repeat identical passes for hours. Fatigue changes their force and dwell time, leading to uneven removal, gouges, or leftover burrs that cause rework and scrap. Many also replace abrasives early to make the work easier, which drives up consumable costs.
For small and midsize manufacturers, these problems scale quickly. When one operator misses a takt time or a bad part slips through inspection, it disrupts welding, coating, or assembly downstream. Small teams can’t make up the lost hours.
“You’re not telling your kids to get jobs in factories sanding parts,” Maximiliano Falcone, VP of Sales Engineering at PushCorp. “Automation has become a necessity because it’s so hard to find people for these jobs.”
Automation addresses variability and risk. Force-controlled cobots maintain consistent pressure, reduce strain injuries, and keep abrasive usage predictable. The result is steadier throughput and safer work without adding more people to an already shrinking labor pool.
Where Cobots Deliver the Most Value in Material Removal
Cobots or more precisely, PFL robots, bring the value of a small footprint to some material removal tasks. They perform best in environments where robot mobility, flexibility, smaller footprints, and quick changeovers matter more than raw speed. These systems fit the kind of work many small and midsize manufacturers handle every day: short runs, frequent setups, and tight floor space.
Why Sanding, Grinding, and Weld Shaving Lead Adoption
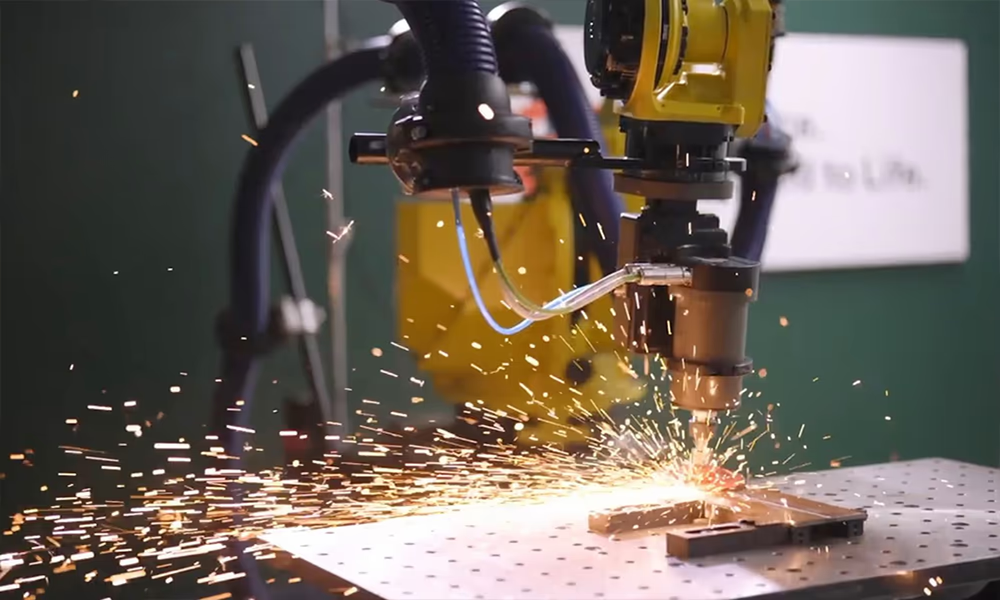
Collaborative robots in action, grinding, polishing, and removing welds with appropriate tooling.
Sanding, grinding, and weld shaving are often the first material removal processes shops choose to automate. They are repetitive, physically demanding, and expose operators to dust, vibration, and strain. In woodworking, composites, and stone and ceramics, cobots equipped with the right spindle and compliance device maintain steady pressure and repeatable quality. They do this without fatigue or added safety risks.
Cobots excel when:
Operators still need to work nearby
Quick redeployment or reprogramming is important
Force-limited robots improve safety and reduce guarding needs
Traditional robots still fit when:
Parts are large or heavy and require high removal forces
The cell runs long, repeatable production cycles with little to no variation
The environment involves heat, heavy dust, or demanding duty cycles
Cobots offer precision, safety, and flexibility for small or high-mix jobs. They can also handle larger parts when set up as mobile systems or when the production layout allows the robot to move between stations. Traditional robots remain the better choice for heavy-duty or high-volume production.
The 6 Building Blocks of a Repeatable Material Removal Cell
Consistency comes from the process design around it. A stable cell depends on how well each element works together: force control, tooling, fixturing, abrasives, safety, and inspection. When these six areas are defined and proven, cobots can deliver repeatable results shift after shift.
1. Force Control and Compliance
Force consistency determines material removal rate, surface quality, and tool life. Maintaining a steady force prevents gouging and protects edges and geometry. Compliance devices allow cobots to “float” over part surfaces while applying a constant force. This capability is key for uniform removal on contoured or uneven parts.
Types of Force Compliance:
Active Force Compliance: Uses air or electric actuators to maintain a set force automatically, even as the robot’s position changes.
Passive Force Compliance: Relies on springs or mechanical flex to absorb variation, ideal for simpler setups and lower-cost applications.
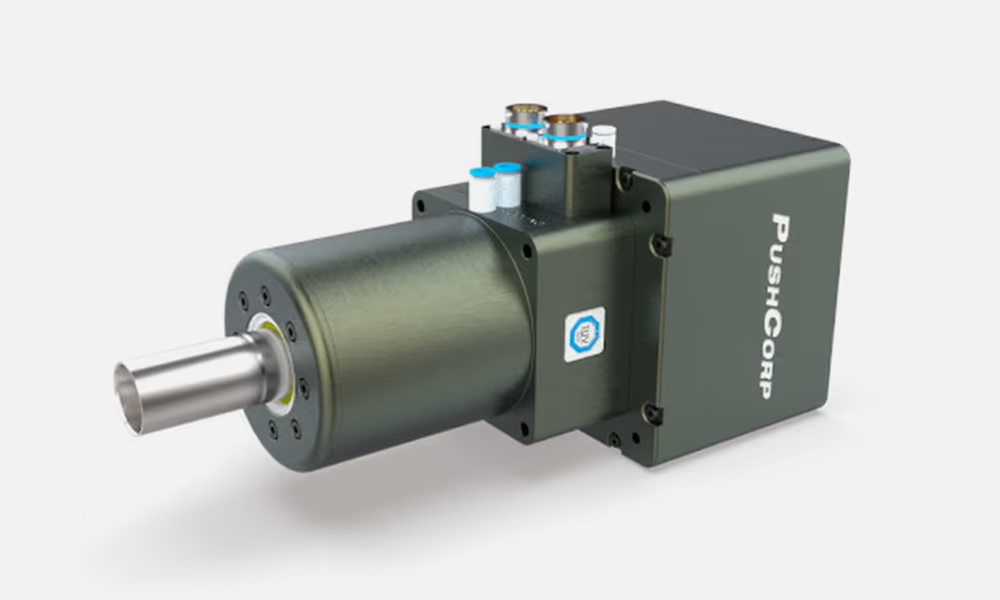
PushCorp spindle used for robotic material removal.
Spindles must be sized for torque, power, and RPM to match the job. Tool form also matters, as belts, wheels, and pads each offer different advantages. For cobots, quick tool change is especially valuable. A spindle that can switch between sanding, grinding, or deburring tools minimizes downtime and helps small teams handle more part types with one cell.
3. Fixturing and Part Presentation
Most SMM parts weren’t designed for automation. They lack consistent datums or flat surfaces that make repeatable clamping easy. Simple locators like corners, pins, and nests often outperform complex fixtures.
Compliance devices absorb these variations and hold a steady force even on irregular shapes. Real-time feedback on carriage position and applied force lets the robot adjust its path automatically when parts aren’t perfectly seated.
“Those parts are not designed for automation… there’s no good way to hold them down,” said Maximiliano Falcone of PushCorp. “That’s why the compliance device is so important—it adjusts for variations in the part design.”
4. Abrasive Strategy
The abrasives used for manual grinding or sanding don’t always translate well to automation. Robots apply more consistent pressure and surface speed, so they need abrasives that can handle that load without glazing or burning.
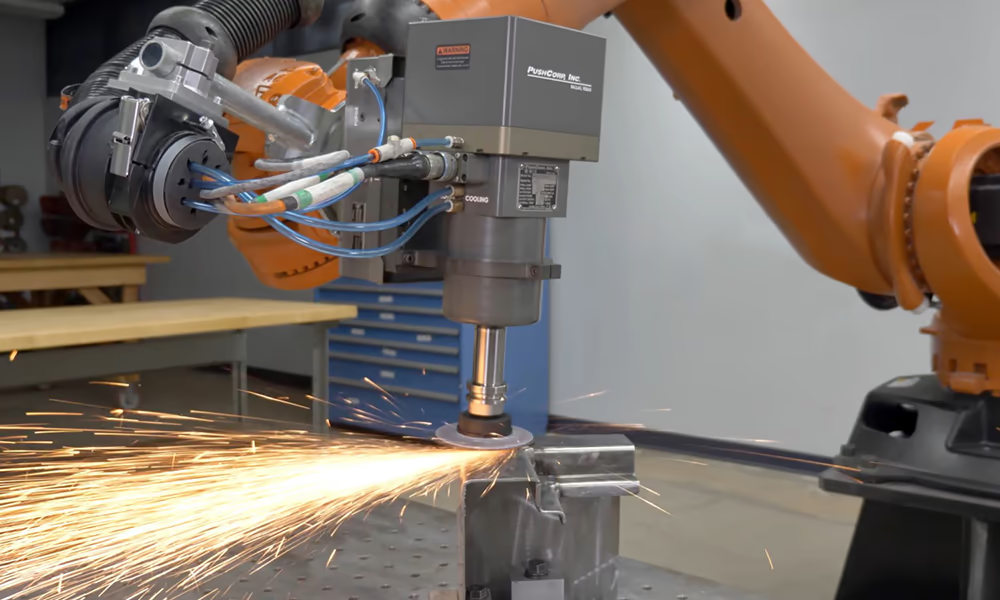
PushCorp robotic belt sander for continuous sanding applications.
PushCorp tests customer applications in-house using its own robotic systems. The goal is to identify the best abrasive type, grit sequence, and belt speed. This process ensures every customer begins production with a proven setup that balances removal rate, finish, and media life.
5. Safety and Collection
Material removal generates dust, sparks, and noise that can affect both operators and equipment. Each cell should include effective dust and fume extraction, spark containment, and well-defined operator zones. Proper airflow and filter maintenance help prevent buildup that can damage components or reduce performance.
For metals like aluminum, collecting fine dust is especially important, as it can be combustible under the right conditions. A clean, well-ventilated workspace protects human workers and keeps the process consistent and the equipment running reliably over time.
6. Inspection and QA
A repeatable process needs measurable quality targets. Define what “good” means before production begins for weld flushness, burr height, edge break size, or geometry tolerance. Cobots can integrate with vision systems or probes to verify results in-line, reducing rework and subjective inspections.
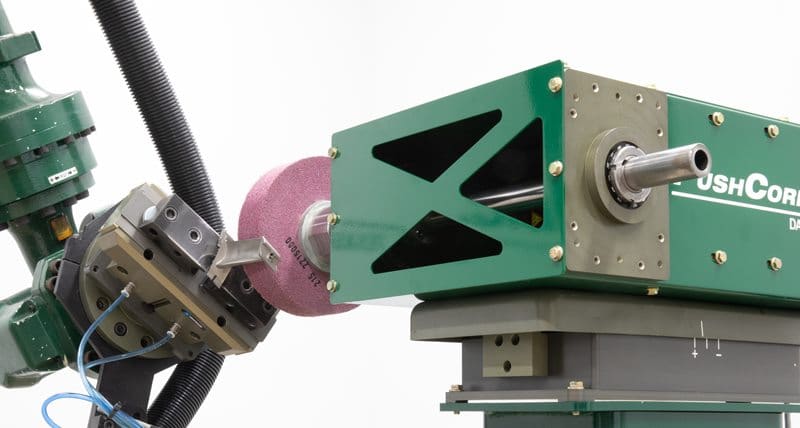
PushCorp’s constant-force compliance and servo spindles control normal force and surface speed during operation. This keeps results consistent across parts, shifts, and operators. When every building block is in place, material removal becomes predictable, measurable, and ready for production.
Proving and Scaling a Reliable Cobot Material Removal Process
A cobot material removal cell performs best when its parameters are tested and proven on real parts before production begins.
Each application starts by defining the goal. How much stock needs to be removed? What finish or tolerance is required? What is the desired cycle time? From there, engineers map the working range for force, RPM, and feed rate to balance removal speed with tool life.
Fixturing and approach paths also need verification. A few short trials can confirm whether the robot reaches every surface without regrips or excess motion. Once the process meets geometry and removal targets, operators can be trained on basic maintenance, abrasive changes, and simple program edits.
When these steps are completed early, the result is a stable, validated process that runs consistently across shifts.
Safety, Quality, and Consumable Savings Drive Real ROI
Return on investment in cobot material removal isn’t measured only in manual labor savings. The real value comes from safer work, more consistent results, and better use of consumables.
Cobots stabilize throughput by removing variation between operators. Fewer parts fall out of tolerance, and rework or scrap drops. Force control also protects abrasives from premature wear. Each belt or disc lasts longer because it runs at the right surface speed and pressure every time.
Safety is another key factor. Material removal work is repetitive, noisy, and full of vibration. Reducing operator exposure prevents injuries and lost-time incidents that can cost more than a robot itself.
Many cobot systems reach payback within months when part geometry and process parameters are well defined. ROI can take longer with variable parts or subjective quality goals, but once optimized, the system stays consistent for years.
Standardizing your finished part quality also opens the door to new market opportunities. Going from manual to automated material removal lets you secure higher-value contracts, providing an indirect benefit that can transform the future of your business.
Consistent results, safer work, and better use of abrasives give the best return on cobot material removal systems. Furthermore, reducing labor turnover is of critical value to any business trying to stay competitive today.
How PushCorp Simplifies Reliable Cobot Material Removal Automation
Manual material removal is difficult to keep consistent, labor is hard to find, and the work is tough on people. Cobots solve part of that problem, but the real consistency comes from the tooling that controls force, speed, and contact. That’s where PushCorp makes the difference.
PushCorps constant-force compliance devices and servo spindles are engineered for grinding, sanding, weld shaving, deburring, gouging, and drilling. The XSeries end-of-arm tools come pre-engineered and quick to install on collaborative robots, reducing setup time while maintaining precise force control.
PushCorp’s GrindX and SandX packages simplify setup for weld removal, edge prep, and surface finishing, helping manufacturers start production faster with proven, tested parameters.All PushCorp tools connect easily with leading collaborative platforms, enabling compact, safe, and reliable material removal cells.
Across every application, PushCorp gives manufacturers steady force, repeatable quality, and safer production.
Contact PushCorp today, and our experienced engineers will help you determine the right system for cobot material removal. We’ll carefully consider your parts and how to achieve the best results for your specific factors.
Products Finishing Podcast: Automation for Mechanical Finishing Processes
Mike Shappell, senior application engineer with Norton | Saint-Gobain Abrasives, takes Products Finishing’s podcast on a video tour of the company’s new Abrasive Process Solutions…
Grinding Robots Market and Key Trends Manufacturers Must Watch
If you can’t hire enough grinders, keep finishes consistent, or hit ship dates, you’re not alone. Manual grinding is struggling to keep pace with modern…
One of the biggest benefits of robotic automation is improved consistency. Robots follow highly repeatable motion paths, which means robotic processing avoids the variability seen…
Achieving a Superior Brushed Metal Finish on Brass Door Handles: Techniques and Tools
Finishing is one of the most critical steps in the manufacturing process, as it directly influences the perception and quality of the end product. Whether…
Solving the 5 Biggest Grinding Automation Challenges
Grinding is tough work, so it’s no surprise manufacturers look to automate it. But automation only works when the process is stable and predictable. Projects…
Whether you’re a small shop taking your first steps into robotics or a global manufacturer scaling up, PushCorp is here to help. Our mission is to automate the toughest jobs. Making every process safer, smarter, and more efficient.