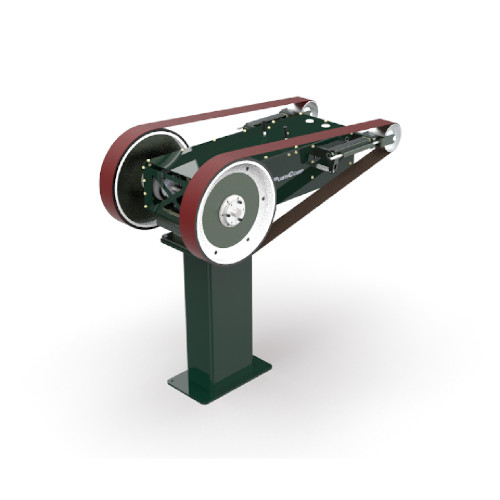
SBS82 Servo Belt Backstand
The SBS82 and SBS92 Servo Belt Backstands provide a solution for automating belt sanding operations. They feature dual shafts that allow multi-step sanding operations with different abrasive belt grits or even combining a belt operation on one side and an abrasive wheel on the other. Both units have the built-in ability to remotely adjust the force applied to the part, belt speed, and belt tracking during part processing, safely from outside the robot workcell.
The SBS82 and SBS92 are compatible with industry standard 132 inch belts up to 4 inches wide. They utilize adjustable air pressure to provide tension to the belts and have integral sensor outputs to detect belt breakage. A position sensor output from the force compliant carriage can be used to sense part position or wheel wear.


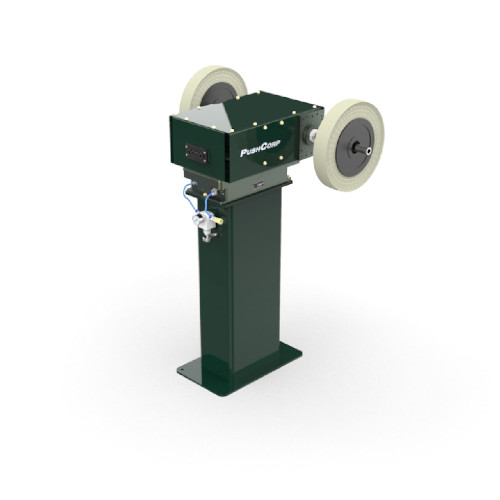
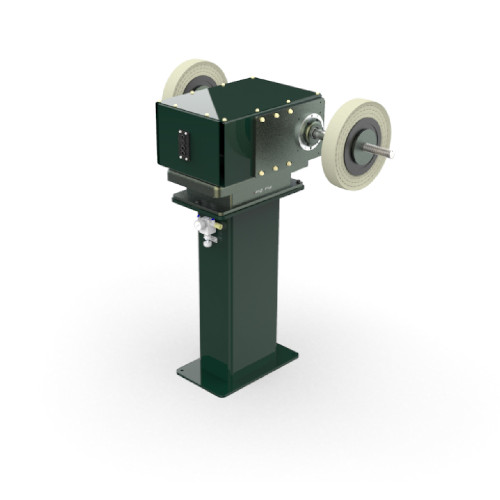
SFS82 Servo Finish Stand
The SFS82 and SFS92 Servo Finishing Backstands provide a solution for automating wheel sanding operations. Like the SBS82 and SBS92, it has dual shafts that allow multi-step sanding operations with different abrasive grits, but it omits the unnecessary belt tracking mechanism, thus reducing its cost. They also have the built-in ability to remotely adjust the force applied to the part or the belt speed, safely from outside the robot workcell.
The SFS82 and SFS92 are delivered with bare shafts that can be used with a wide variety of sanding, grinding, or polishing wheel media. A position sensor output from the force compliant carriage can be used to sense part position or wheel wear.