



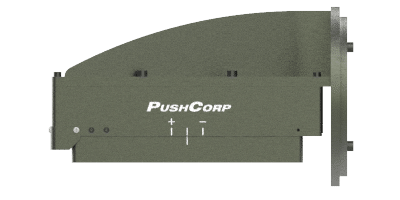
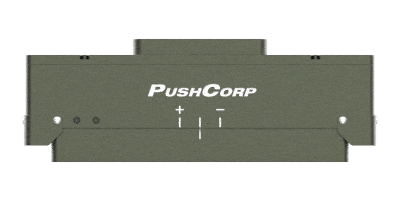
The AFD620 Series is available in two configurations: AFD620-1 Vertical and the AFD620-2 Horizontal. The units are functionally identical but differ in the orientation in which they attach to the robot. The AFD620-1 applies force perpendicular to the robot’s face plate, whereas the AFD620-2 is parallel. These configurations allow you to optimize a robot’s reach and dexterity for your particular application.
The FCUFLEX controller is used to set the applied force and monitor I/O. This equipment can be controlled using a PLC, robot controller, or PC.
Key Features
Consistent force regardless of orientation
Automatic acceleration compensation
Automatic payload weight measurement
Force can be varied based on slide position
115 lbf [511 N] maximum compliant force
1.6 in [40 mm] Linear compliant stroke
Fast mechanical response
All fittings, fasteners, and threaded holes are METRIC
Specifications
| Model | AFD620 |
| Max Force | 115 lbf [511 N] |
| Force Resolution | ±0.4 lb. [±2.0 N] |
| Max Payload Weight | 115 lbs [52.2 kg] |
| Weight | AFD620-1 – 39 lbs [17.7 Kg] , AFD620-2 – 27 lbs [12.2 Kg] |
| Compliant Stroke | 1.6 in [40 mm] |
| Supply Air | Dry, 5µm Filtered, Non-lubricated, 80-90 psi [5.5-6.2 Bar] |
Common Pairings
Frequently used components and accessories with the AFD620.
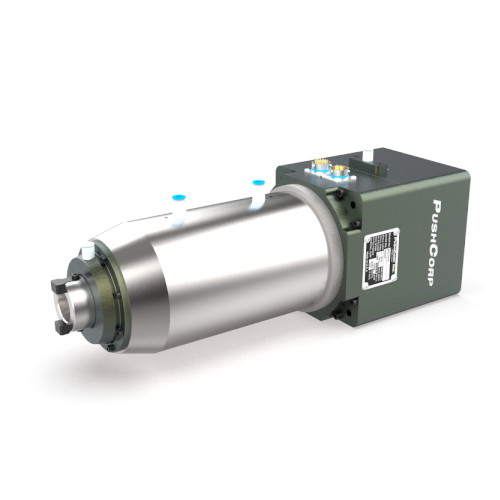
SM0612

SM0612
SM0612 High-Torque, Robotic Servo Spindle The PushCorp SM0612 high-torque servo spindle...
STC1015
STC1015
STC1015 High-Torque, Robotic Servo Spindle Motor The PushCorp STC1015 high-torque...
STC1515

STC1515
STC1515 High-Speed, Robotic Servo Spindle The PushCorp STC1515 high-speed servo spindle...
FCUFLEX

FCUFLEX
Active Compliance Force Controller The PushCorp FCUFLEX compliance controller, combined with PushCorp's Active...
Ready to Automate?
Contact PushCorp today to integrate the AFD620 into your robotic system.
Request a Quote